Scherm met tijd en GPS coördinaten. Deze kun je precies zoals ze hier staan in Google Earth invoeren.
 Module met geïntegreerde keramische antenne
Module met geïntegreerde keramische antenne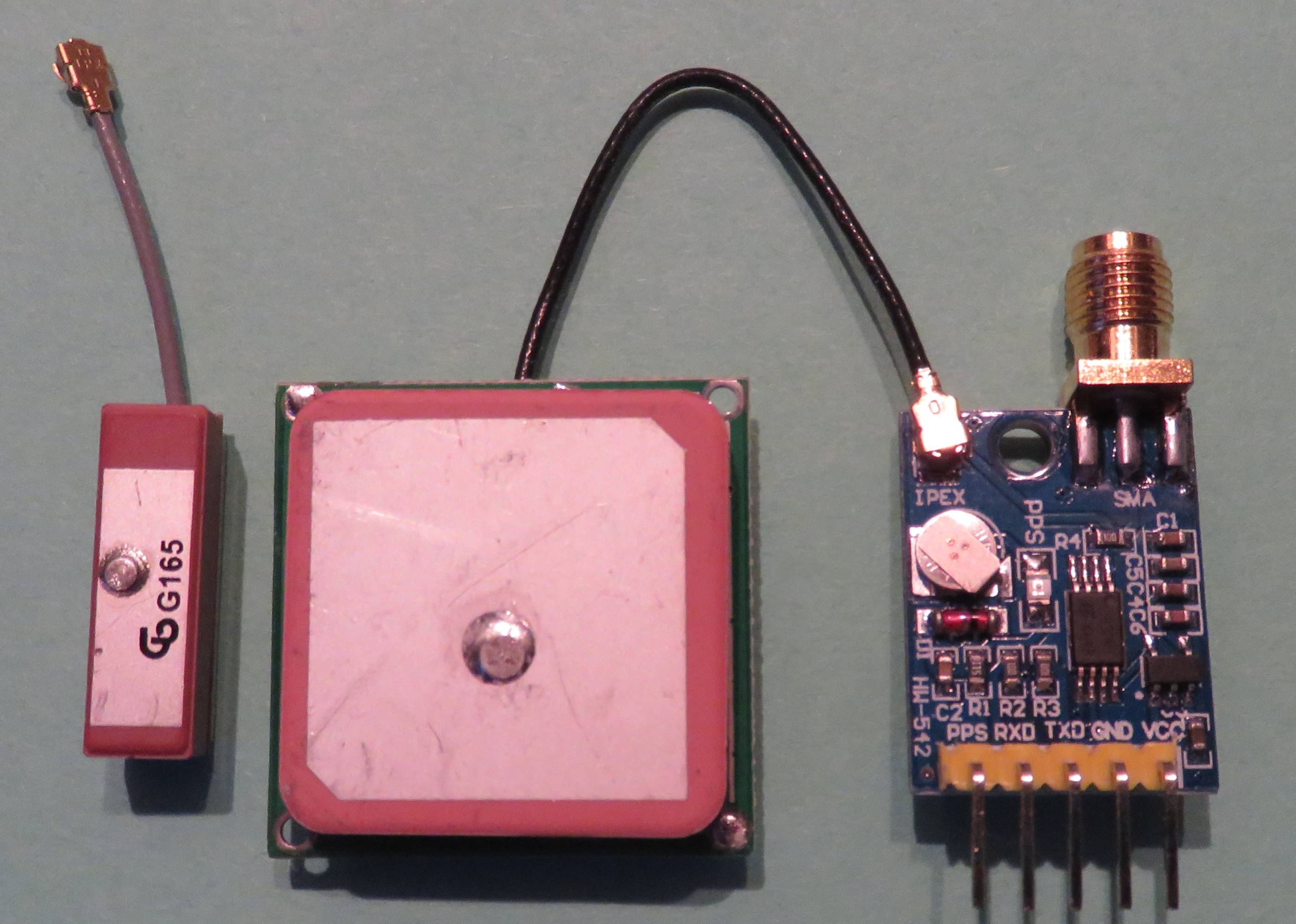 Antennes (K85 en G165) en de module
Antennes (K85 en G165) en de module